|
Recently, I interned at Boston Dynamics working under Michael Lutter on reinforcement learning for whole-body manipulation in eAtlas. In my past life as an undergraduate at IIT (BHU) Varanasi, I was a student researcher at Stochastic Robotics Lab, IISc, advised by Shishir Kolathaya and Ayonga Hereid, developing lightweight control frameworks for robust bipedal walking and at the Movement Generation and Control Group, Max Planck Institute, working on agile bipedal locomotion with Majid Khadiv. At the Seethapathi Motor Control Lab, MIT, I briefly collaborated on human locomotor adaptation.
Email / LinkedIn / Google Scholar / Twitter / GitHub |
|

|
|
|
Lokesh Krishna, Sheng Cheng, Junheng Li, Naira Hovakimyan , Quan Nguyen Accepted at IEEE RA-L in 2025 arXiv / video |
|
Prashanth Ravichandar*, Lokesh Krishna*, Nikhil Sobanbabu, Quan Nguyen Accepted at IROS 2025 website / arXiv / GitHub / video |
|
Lokesh Krishna, Quan Nguyen Accepted at IROS 2023 arXiv / video |
|
Lokesh Krishna*, Guillermo Castillo*, Utkarsh Mishra, Ayonga Hereid, Shishir Kolathaya Accepted at IEEE RA-L (journal) and ICRA 2022 IEEE Xplore / arXiv / video |
|
Lokesh Krishna, Utkarsh Mishra, Guillermo Castillo, Ayonga Hereid, Shishir Kolathaya Accepted at IROS 2021 IEEE Xplore / arXiv / project page / video |
|
Kartik Paigwar, Lokesh Krishna, Sashank Tirumala, Naman khetan, Aditya Sagi, Ashish Joglekar, Shalabh Bhatnagar, Ashitava Ghosal, Bharadwaj Amrutur, Shishir Kolathaya Accepted at CoRL 2020 PMLR / arXiv / project page / GitHub / video / slides |
|
|
|
Lokesh Krishna, Nikhil Sobanbabu, Quan Nguyen arXiv / GitHub / video |
|
|
A Framework for Learning Human Locomotor Adaptation
under Rigid Body assumptions
|
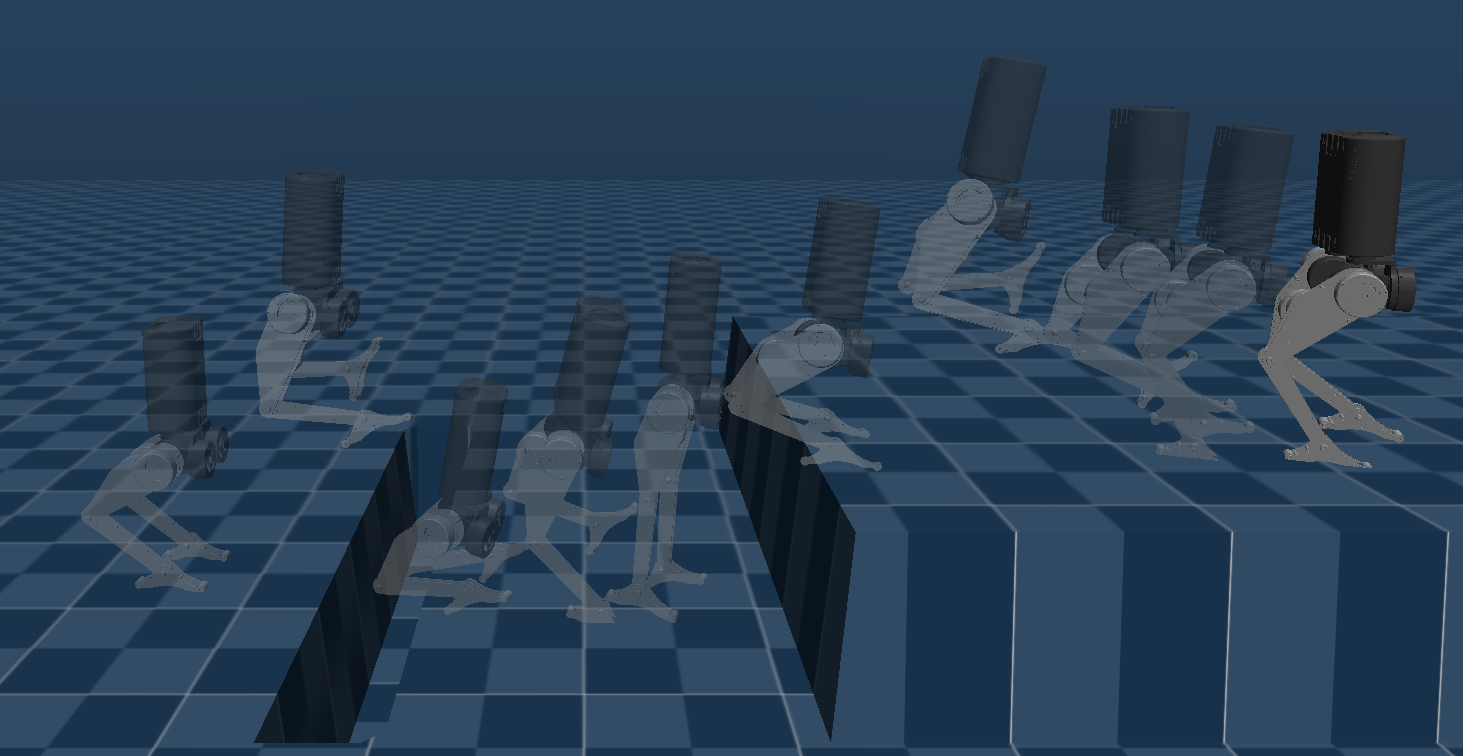
Learning Agile Bipedal Locomotion Through Trajectory Driven |
|
Intelligent Picking for ware house automation
National Finalists, Flipkart Grid 2.0 Robotics Challenge
|

|
GestureBot: A mobile manpualtion platform for gesture controlled teleoperation
|
AADOpt: A Framework for Antenna Array Design and Synthesis through Optimisation
|
ArduinoMLP: A NN netowrk library for Arduino
|
|
|

|
Technical Head, 2020-21
Founder, 2020 |
 |
Coordinator, Robotics Summer Camp 2021
Mentor, Robotics Summer Camp 2020 Panel Member, 2020-21 Mentor, 2019-20 |
|
I am a Roboticist, I dont make cool websites. He does. |